Comme l'autre logiciel populaire de réduction d'images astronomiques IRAF, MIDAS est un outil puissant et modérément ergonomique, disposant de nombreux outils bien rodés. Les détails d'implémentation de ces routines sont cependant peu documentés, et l'utilisateur est limité aux fonctions disponibles. Celles-ci couvrent l'ensemble des besoins habituels pour la réduction de données astronomiques, et peuvent s'appliquer à tout type d'observation : objets ponctuels, étendus, lumineux ou faibles.
Ce sont donc des boîtes noires généralistes, très utiles pour réduire rapidement et efficacement une observation, sans devoir refaire la cascade de calibration.
Si l'on souhaite appréhender différemment les données, il est possible d'utiliser les facilités de programmation de ces environnements, en s'accommodant des contraintes internes (format des données, fonctions disponibles), pour modifier les étapes délicates.
L'alternative qui offre une liberté quasi-totale est d'utiliser un language de programmation universel (ou elementaire, tels FORTRAN, C, C++). On s'affranchit ainsi de la tutelle des procédures standard, libre d'implémenter toute idée alternative qui puisse s'appliquer à nos données. Bien utilisés, ils réduisent par ailleurs le temps d'exécution des calculs. Il est évidemment plus long de réaliser ces implémentations que d'utiliser celles existantes, mais cela est vu comme un investissement et comme le prix de la liberté d'analyse.
Ennui omniprésent et imprévisible, les rayons cosmiques sont une source de confusion possible avec les raies d'émission galactiques. Si le filtrage spatial en élimine la majeur partie, le pourtour des impacts où ont diffusé quelques e- n'est pas assez déviant pour être rejeté. D'autre part, il est inconfortable de remplacer la zone d'impact par une approximation polynomiale, incontestablement lisse, mais n'ayant aucune validité : on ne peut rien savoir de ce qui se trouve sous l'impact après l'avoir identifié. Le filtre suppose que l'on n'y trouve rien de spécial, et y applique la valeur interpolée des pixels voisins.
La position des impacts n'est pas conservée, ce qui interdit de leur affecter par la suite un poids nul, tel qu'ils le méritent.
Disposer de plusieurs réalisations des observations permet par contre d'appliquer un filtrage temporel aux données : les sources astrophysiques sont identiques sur toutes les images, alors qu'il est improbable qu'un impact de rayon cosmique se trouve au même endroit sur deux acquisitions successives.
L'implémentation d'un tel filtre fut la première étape de mon étude ( voir section 3.4).
La principale contamination systématique, plus prévisible, correspond au bruit de soustraction du ciel. La brillance nocturne de l'air provient de la recombinaison électronique des atomes ionisés et de la désexcitation spontanée des molécules agitées par la lumière solaire durant le jour, et par les particules du vent solaire et autres vagabonds énergétiques dont nous protège l'atmosphère terrestre. Le spectre d'émission de l'air nocturne varie à mesure que les niveaux d'exitation se peuplent ou se dépeuplent. L'intensité des raies d'émission obtenue sur le détecteur n'est donc pas strictement identique sur les acquisitions successives. La soustraction de ce contaminant doit alors se faire sur chaque acquisition indépendamment.
Le bruit résiduel de cette soustraction contient une composante statistique intrinsèque (bruit de grenaille), et une composante d'erreur de modélisation du spectre de l'air et de modélisation de la fonction de dispersion.
En effet, le spectre réel est convolué avec la transposée spectrale de
l'image de la fente, puis intégré par chaque pixel dans l'intervalle
de ![]() qu'il couvre
(
qu'il couvre
(![]() 2.65 Å/pix, la fente de 1'' se transpose en 13.25 Å
et la raie interdite de [OI] ionosphèrique est large de moins de 1 Å),
pour former le spectrogramme mesuré.
2.65 Å/pix, la fente de 1'' se transpose en 13.25 Å
et la raie interdite de [OI] ionosphèrique est large de moins de 1 Å),
pour former le spectrogramme mesuré.
Si l'on ne corrige pas la dispersion, il est difficile
d'estimer le spectre de l'air, car il ne suit pas l'alignement des pixels.
Si l'on corrige la dispersion, le spectre à chaque ![]() sera rééchantillonné selon une même grille régulière en
sera rééchantillonné selon une même grille régulière en ![]() .
Le spectrogramme obtenu sera bien aligné avec ses pixels, mais le spectre
de l'air n'apparaîtra pas de manière strictement identique à
différents
.
Le spectrogramme obtenu sera bien aligné avec ses pixels, mais le spectre
de l'air n'apparaîtra pas de manière strictement identique à
différents ![]() .
.
Le rééchantillonnage crée une corrélation entre pixels adjacents spectralement, qui dépend de la position relative de l'échantillonnage original du CCD et de celui imposé (voir Fig 3.1).
On perd donc en partie l'indépendance des pixels de l'image brute, qui permet de les considérer statistiquement sur un pied d'égalité. Il faut tenir compte du coefficient de corrélation introduit pour calculer la covariance des pixels adjacents si l'on veut modéliser parfaitement les erreurs de mesure. Au lieu d'une image du bruit décorrélé, on a besoin de construire les matrices de covariances de chaque pixel, ce qui est beaucoup plus lourd et ardu.
|
J'ai donc choisi de rééchantillonner le plus tard et le moins possible dans mon implémentation. La fonction de dispersion fournit l'échelle spectrale irrégulière associée à l'échelle régulière des pixels que l'on conservera.
L'![]() il couplé au cerveau humain est un instrument très efficace pour
déceler un signal perdu dans du bruit, ainsi que toute anomalie.
Trois opérateurs garantissent que l'on trouve le meilleur résultat possible,
compte tenu des outils utilisés.
il couplé au cerveau humain est un instrument très efficace pour
déceler un signal perdu dans du bruit, ainsi que toute anomalie.
Trois opérateurs garantissent que l'on trouve le meilleur résultat possible,
compte tenu des outils utilisés.
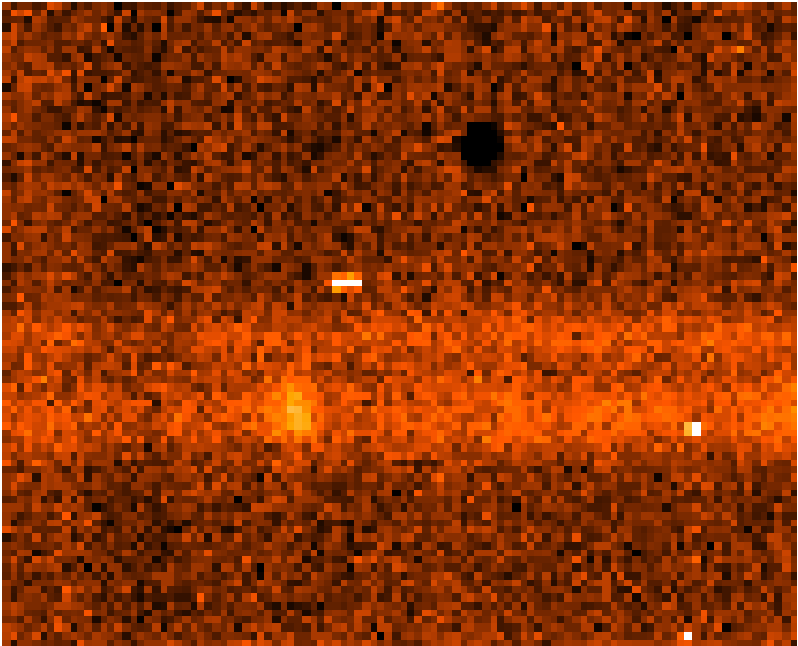
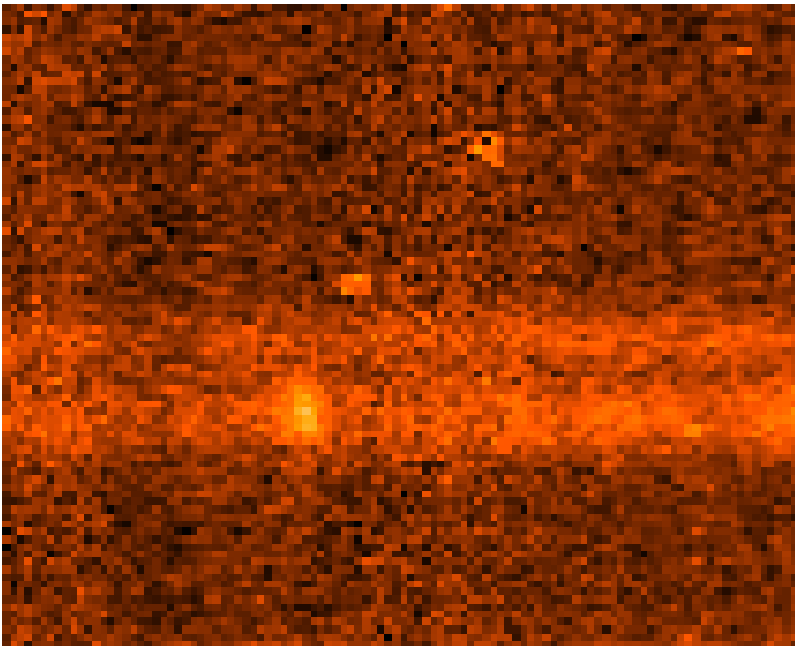
Cependant, lorsque le signal est du même ordre que le bruit (cas d'une supernova faible et/ou d'une mauvaise qualité d'image), la détection visuelle de la trace est hasardeuse. En effet, les paramètres d'extraction sont estimés à partir des images réduites, mais non soustraites du fond de ciel. Le signal n'apparaît donc pas sur un fond uniforme, mais sur le spectre structuré (par les raies d'émission) du ciel.
Disposer d'images intermédiaires auxquelles serait soustraite une première estimation grossière du spectre du ciel aiderait l'opérateur à déceler la trace sur l'ensemble de l'intervalle spectral, plutôt que de manière intermittente entre les raies du ciel.
Par ailleurs, les coordonnées de pointage et l'angle polaire
d'observation (référencés dans les en-têtes) permettent de calculer les
décalages attendus entre les images.
Si la précision de ces coordonnées n'est pas excellente en absolu
(![]() 0.5''),
on peut s'attendre à ce que la précision relative pour les petits décalages
entre images soit bonne (<0.1''
0.5''),
on peut s'attendre à ce que la précision relative pour les petits décalages
entre images soit bonne (<0.1'' ![]() 0.5 pixel, pour des décalages de
15 pixels = 3'').
0.5 pixel, pour des décalages de
15 pixels = 3'').
Au lieu de soustraire le fond de ciel et d'extraire le signal pour chacune des images réduites, ma procédure consistera à réduire toutes les images et à en soustraire le fond de ciel, puis à les combiner pour effectuer le filtrage temporel des rayons cosmiques. Ces operations sont faites sans sauvegarde intermédiaire (source d'erreurs numériques), et fournissent un unique spectrogramme de fond uniformément nul, de pixels indépendants, dont sera ensuite extrait le signal. Ce spectrogramme calibré résume l'information contenue dans toutes les images, et permet un diagnostic visuel confortable.
L'opérateur n'a plus à définir les zones d'estimation du ciel, qui sont calculées automatiquement via quelques paramètres internes plus un paramètre ajustable (la hauteur des zones, valant 200 pixels par defaut). On verra dans le chapitre suivant comment automatiser aussi les paramètres d'extraction.