Après l'âge d'or de la mécanique et de la thermodynamique, où la connaissance et la prédiction semblaient ne pas avoir de bornes dans un univers obéissant à des lois physiques déterministes, vint la désillusion de la théorie quantique, probabilisant une nature incertaine. Auparavant, la notion de probabilité a été formalisée par de nombreux mathématiciens (tels Gauss, Poisson, Cauchy, Bernoulli) et son application aux sciences est devenue incontournable.
Les scientifiques s'appliquent à dévoiler la vérité par l'expérience. Le raisonnement logique et l'outil mathématique leur permettent de faire des prédictions vérifiables ou d'interpréter des observations, dans le cadre d'une théorie dont on questionne la véracité. Il n'est pas étonnant que la représentation du monde ait tellement changée au cours des âges, à mesure que les outils mathématiques et les instruments d'observations se perfectionnent. Il est cependant remarquable que ces avancées soient liées : l'émergence de nouveaux concepts physiques ouvre la voie à l'exploration de nouvelles branches des mathématiques et à des innovations technologiques, qui permettront de nouvelles expériences et la découverte de nouveaux concepts.
Comme on vient de le voir, l'interprétation des observations est limitée par le bruit de mesure, que l'on peut réduire par l'accumulation de réalisations identiques, et par la compréhension de la nature des erreurs statistiques et systématiques. Plus subtilement, l'action de la mesure a généralement un effet, même minime, sur l'objet d'étude. Ses propriétés sont modifiées par l'acte de mesurer, et la mesure n'est pas absolue. On connaît l'état de l'objet sachant qu'il est mesuré.
En bref, un diagnostic doit être accompagné de sa probabilité d'être vrai, de son incertitude, qui se calcule en propageant les erreurs connues à chaque étape de l'analyse des mesures. Le caractère aléatoire, stochastique, d'un signal se formalise par une densité de probabilité, qui décrit la probabilité que le signal prenne une valeur plutôt qu'une autre. C'est cette fonction que l'on essaye d'estimer d'après les données. Sa forme dépend du type de statistique régissant le signal, mais on l'approxime souvent par une fonction normale3.3dont la manipulation mathématique est aisée. Le ``théorème central limite'' stipule par ailleurs que la somme de variables aléatoires indépendantes, sous des conditions de régularité, tend vers une loi normale lorsque le nombre de variables tend vers l'infini (Loi des grands nombres).
|
La loi normale possède deux paramètres : sa moyenne ![]() et son écart-type
et son écart-type
![]() . La vraisemblance de détection d'un signal sera exprimée en nombre
de
. La vraisemblance de détection d'un signal sera exprimée en nombre
de ![]() au dessus du fond, égal au rapport signal à bruit
au dessus du fond, égal au rapport signal à bruit
![]() .
.
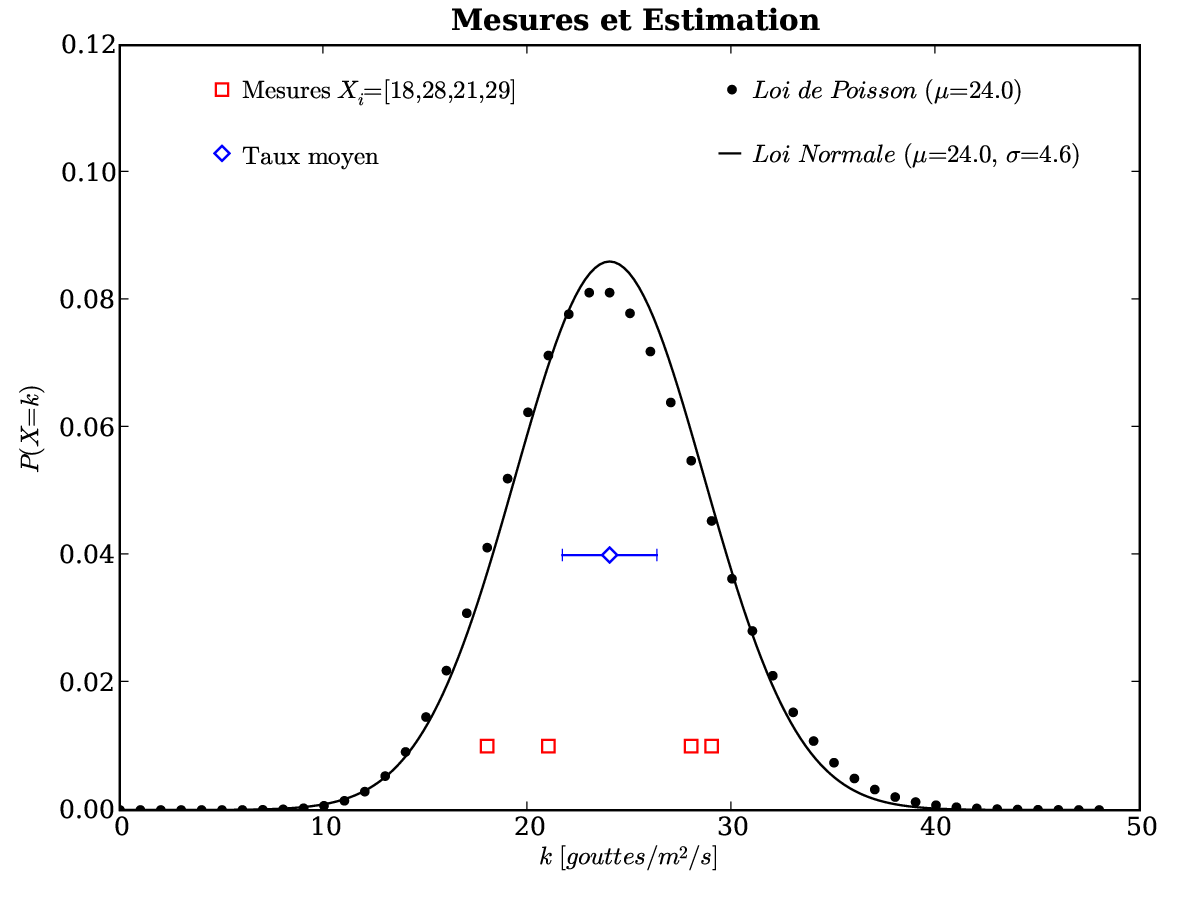
Ainsi, si l'on mesure ![]() = [18,28,21,29] gouttes de pluie par seconde,
on annoncera qu'il pleut en moyenne
= [18,28,21,29] gouttes de pluie par seconde,
on annoncera qu'il pleut en moyenne
![]() =
=
![]() /4= 24 gouttes/sec, avec un écart-type de
/4= 24 gouttes/sec, avec un écart-type de
![]() =
=
![]() /4= 4.6.
Ces estimées sont entachées d'erreur car on ne dispose pas d'une infinité
de mesures. L'erreur d'estimation de
/4= 4.6.
Ces estimées sont entachées d'erreur car on ne dispose pas d'une infinité
de mesures. L'erreur d'estimation de ![]() peut être elle-même estimée en
supposant une loi normale, pour laquelle les incertitudes s'ajoutent
quadratiquement :
peut être elle-même estimée en
supposant une loi normale, pour laquelle les incertitudes s'ajoutent
quadratiquement :
 =2.3.
On concluera que les mesures sont en accord avec une répartition
de moyenne 24.0
=2.3.
On concluera que les mesures sont en accord avec une répartition
de moyenne 24.0![]() 2.3 et d'écart-type 4.6, dans l'hypothèse d'une loi
normale.
2.3 et d'écart-type 4.6, dans l'hypothèse d'une loi
normale.
Le nombre de gouttes est en fait une variable aléatoire discrète
(![]() ne prend que des valeurs entières), qui suit une fonction de
répartition Poissonnienne3.4,
dont l'unique paramètre est le taux moyen
ne prend que des valeurs entières), qui suit une fonction de
répartition Poissonnienne3.4,
dont l'unique paramètre est le taux moyen ![]() .
Comme on le voit en Figure 3.2, pour un taux de 24, les deux lois
sont proches, et quatre mesures sont loin de suffire à les différencier.
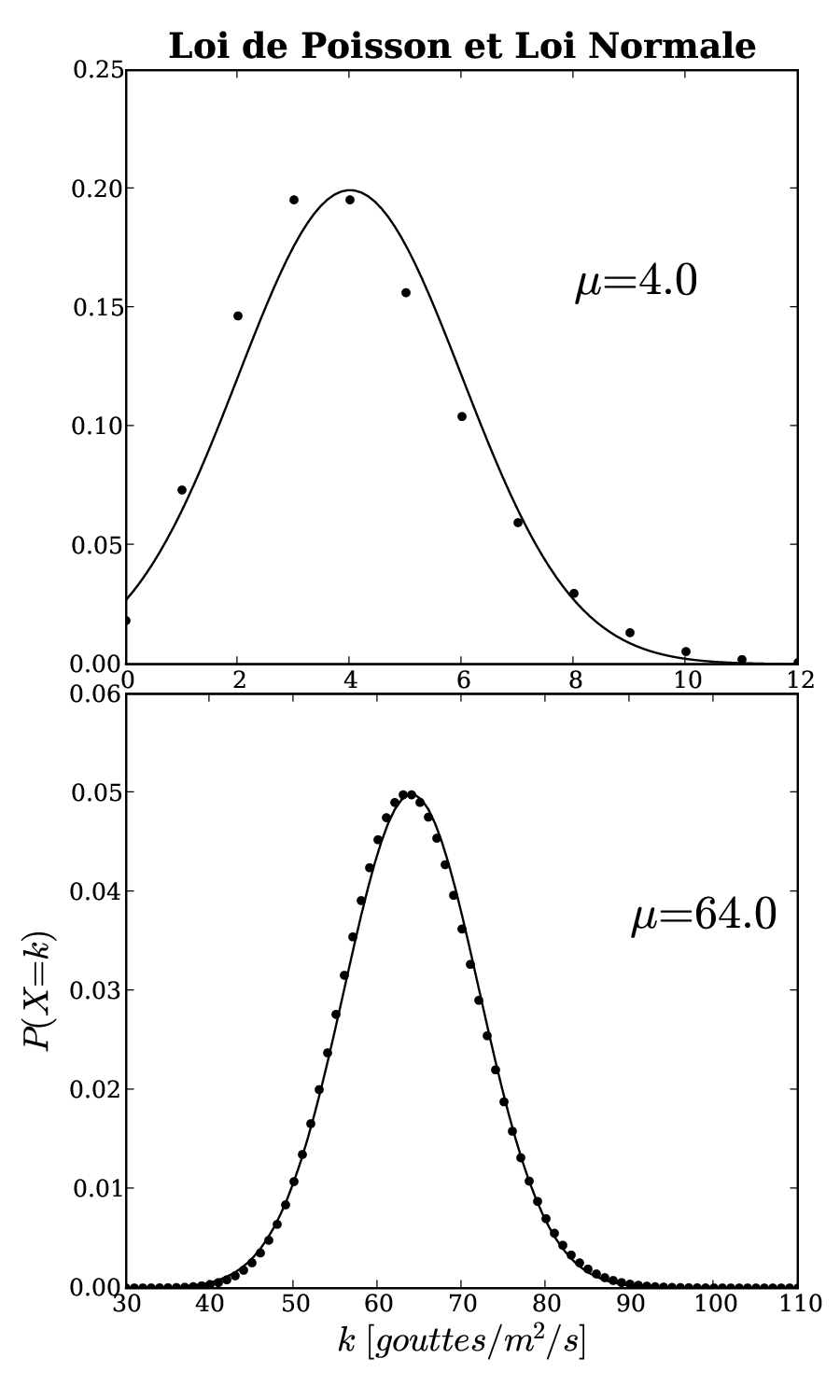
La loi de Poisson s'approxime bien, pour un taux
.
Comme on le voit en Figure 3.2, pour un taux de 24, les deux lois
sont proches, et quatre mesures sont loin de suffire à les différencier.
La loi de Poisson s'approxime bien, pour un taux ![]() suffisamment grand, par
une loi normale de même moyenne
suffisamment grand, par
une loi normale de même moyenne ![]() , et de même écart-type
, et de même écart-type
![]() .
.
Ce rappel sur l'estimation des processus stochastiques terminé, voyons comment se transcrivent ces notions dans le cas de la spectroscopie avec des capteurs CCD, et comment se formalise la propagation des bruits au cours de la calibration.
Dans notre cas, on ne compte pas des gouttes de pluie, mais des grains de lumière : les photons. La seule épuisette à photons que l'on connaisse est l'effet photoélectrique, qui libère des électrons que l'on sait mieux manier. Cet effet, découvert par H.R. Hertz en 1887, interprété par A. Einstein en 1905 en s'inspirant des travaux sur les quantas de M. Plank, est un exemple d'avancée des concepts scientifiques par l'expérience et le raisonnement. Un siècle après, les applications industrielles ne se comptent plus, des panneaux solaires aux capteurs numériques. Surtout, la dualité et la quantification de l'énergie des particules devint indiscutable, intronisant la théorie quantique comme ``modèle standard'' de la physique des particules.
Brièvement, les solides se distinguent électriquement en 3 catégories :
les isolants, dont les électrons de valence sont liés à leur atomes,
les conducteurs (ou métaux) dont les électrons de valence circulent
d'un atome à l'autre,
et les cristaux semi-conducteurs, dont les électrons peuvent circuler
si l'on chauffe au-delà d'une certaine température.
Cette hausse d'énergie peut provenir localement d'un photon de fréquence ![]() ,
qui ait une énergie h
,
qui ait une énergie h![]() suffisante pour entraîner l'électron sur
une orbite conductrice, sans toutefois le détacher définitivement
de la maille du cristal. L'électron part alors vers là où il y a plus de
trous et moins d'électrons, et laisse un trou.
Les trous se déplacent aussi, mais plus lentement.
suffisante pour entraîner l'électron sur
une orbite conductrice, sans toutefois le détacher définitivement
de la maille du cristal. L'électron part alors vers là où il y a plus de
trous et moins d'électrons, et laisse un trou.
Les trous se déplacent aussi, mais plus lentement.
Les Dispositifs à Charges Couplées (CCD) exploitent les propriétés
des semi-conducteurs pour obtenir une bonne efficacité quantique q
(nombre d'électrons libérés par photons, 0.6 < q < 0.8 e-/h![]() entre
4000 et 8000 Å pour la CCD Tektronix de FORS1).
entre
4000 et 8000 Å pour la CCD Tektronix de FORS1).
Cette efficacité quantique dépend de la longueur d'onde ![]() =c/
=c/![]() des photons, et peut varier d'un pixel à un autre en raison des imperfections de
manufacture.
Ces variations sont reflétées dans le champ plan (variation pixel à pixel)
et dans la courbe de réponse instrumentale (dépendance en
des photons, et peut varier d'un pixel à un autre en raison des imperfections de
manufacture.
Ces variations sont reflétées dans le champ plan (variation pixel à pixel)
et dans la courbe de réponse instrumentale (dépendance en ![]() ).
).
Le circuit de lecture apporte par ailleurs un niveau de base (le piédestal),
un bruit de lecture (le read out noise : RON ![]() 5.4 e-/pixel),
et un courant d'obscurité qui remplit les pixels avec le temps
(
5.4 e-/pixel),
et un courant d'obscurité qui remplit les pixels avec le temps
(![]() 9 e-/hr/pixel pour FORS1, négligeable et négligé
dans les analyses3.5)
9 e-/hr/pixel pour FORS1, négligeable et négligé
dans les analyses3.5)
Le flux de photons
![]() arrivant en amont de l'atmosphère terrestre
obéit à une loi de Poisson : son bruit statistique s'apparente à un
bruit de grenaille.
La transmission atmosphérique
arrivant en amont de l'atmosphère terrestre
obéit à une loi de Poisson : son bruit statistique s'apparente à un
bruit de grenaille.
La transmission atmosphérique
![]() , la réflectivité des miroirs
et la transmission des optiques
, la réflectivité des miroirs
et la transmission des optiques
![]() ainsi que l'efficacité quantique du
détecteur
ainsi que l'efficacité quantique du
détecteur
![]() tamisent ce flux.
Ce tamisage conserve la nature Poissonnienne du
flux d'événements, et le flux
tamisent ce flux.
Ce tamisage conserve la nature Poissonnienne du
flux d'événements, et le flux ![]() d'e- libérés dans le CCD s'écrit
d'e- libérés dans le CCD s'écrit
Son écart type
![]() est directement mesurable à partir des spectrogrammes.
Ceux-ci sont exprimés en ADUs, unité propre à chaque
détecteur et proportionnelle aux nombre d'e- stockés par pixel.
Le coefficient de proportionalité g est appelé gain du CCD
( g
est directement mesurable à partir des spectrogrammes.
Ceux-ci sont exprimés en ADUs, unité propre à chaque
détecteur et proportionnelle aux nombre d'e- stockés par pixel.
Le coefficient de proportionalité g est appelé gain du CCD
( g ![]() 1.46 e-/ADU pour FORS1).
Ce changement d'unité, ou normalisation, ne conserve pas la nature Poissonienne
du signal :
1.46 e-/ADU pour FORS1).
Ce changement d'unité, ou normalisation, ne conserve pas la nature Poissonienne
du signal :

Le tamisage est factorisé, lors de l'analyse, en champ plan f(X![]() , Y
, Y![]() )
et réponse instrumentale fois le gain3.6
)
et réponse instrumentale fois le gain3.6
![]() (
(![]() )g :
)g :
![$\displaystyle F_{ADU}({\tt X}_i,{\tt Y}_j)=\frac{ F_0(\lambda) f({\tt X}_i, {\t...
...}(\lambda({\tt X}_i))g}{g} =\frac{ F_{e^-}(\lambda({\tt X}_i))}{g} \quad [ADU] $](img166.png)
L'écart-type du flux mesuré s'écrit donc
![$\displaystyle \sigma_{ADU}({\tt X}_i,{\tt Y}_j)=\sigma_0(\lambda({\tt X}_i))
\...
... \frac{f({\tt X}_i, {\tt Y}_j) \mathcal{R}(\lambda({\tt X}_i))}{g}}\quad [ADU] $](img167.png)
On cherche à estimer ![]() et
et ![]() , en unités de flux lumineux,
à partir de la mesure du flux en ADU.
Les relations précédentes se réécrivent alors
, en unités de flux lumineux,
à partir de la mesure du flux en ADU.
Les relations précédentes se réécrivent alors
![$\displaystyle F_0({\tt X}_i,{\tt Y}_j) = \frac{ F_{ADU}({\tt X}_i,{\tt Y}_j) }
{ f({\tt X}_i, {\tt Y}_j) \mathcal{R}(\lambda({\tt X}_i)) }\quad [erg/cm^2] $](img168.png)
![$\displaystyle \sigma_0({\tt X}_i,{\tt Y}_j) = \sqrt{F_0} =
\sqrt{ \frac{F_{ADU}}{ f({\tt X}_i, {\tt Y}_j) \mathcal{R}(\lambda({\tt X}_i)) }}
\quad [erg/cm^2] $](img169.png)
Le calcul du flux ![]() passe aussi par la soustraction du piédestal
passe aussi par la soustraction du piédestal ![]() et du spectre du ciel
et du spectre du ciel
![]() /g (en ADUs).
Dans le cas d'un signal faible, on considère que le bruit statistique
provient principalement du bruit de lecture (RON en e-) et du fond de ciel
(cas d'une observation limitée par le bruit de fond).
Le bruit du ciel est Poissonien (
/g (en ADUs).
Dans le cas d'un signal faible, on considère que le bruit statistique
provient principalement du bruit de lecture (RON en e-) et du fond de ciel
(cas d'une observation limitée par le bruit de fond).
Le bruit du ciel est Poissonien (
![]() ),
et dans l'hypothèse de lois normales indépendantes, les bruits s'ajoutent
quadratiquement.
Ainsi, pour chaque pixel, on peut écrire le signal mesuré S et son bruit
propagé
),
et dans l'hypothèse de lois normales indépendantes, les bruits s'ajoutent
quadratiquement.
Ainsi, pour chaque pixel, on peut écrire le signal mesuré S et son bruit
propagé ![]() , en supposant que les modèles de piédestal, de champ plan
et du spectre du ciel sont parfaits et n'introduisent pas de bruit systématique :
, en supposant que les modèles de piédestal, de champ plan
et du spectre du ciel sont parfaits et n'introduisent pas de bruit systématique :
![$\displaystyle S = \frac{F_{ADU}-B_{ADU}-C_{ADU}}{f\mathcal{R}}
= \frac{S_{ADU}}{f\mathcal{R}}\quad [erg/cm^2]$](img174.png)
![$\displaystyle \sigma_S = \frac{ \sqrt{(RON/g)^2 + C_{ADU}/g }}{f\mathcal{R}} =
...
...al{R}g}\right)^2 +
\frac{C_{ADU}}{(f\mathcal{R})^2 \times g} }\quad [erg/cm^2]$](img175.png)
Dans le cas général, on ajoute le bruit de Poisson du signal à celui du ciel :
![$\displaystyle \sigma_S = \sqrt{\left( \frac{RON}{f\mathcal{R}g}\right)^2 +
\frac{C_{ADU}+S_{ADU}}{(f\mathcal{R})^2 \times g} }\quad [erg/cm^2]$](img176.png)
Les formules précédentes rappellent que la qualité de l'estimation
du signal et de son bruit dépendent de la qualité des modèles servant
à ces estimations : piédestal B, champ plan f, réponse
![]() et
spectre du ciel C, mais aussi du bruit de lecture RON et du gain g pour
l'estimation du bruit.
et
spectre du ciel C, mais aussi du bruit de lecture RON et du gain g pour
l'estimation du bruit.
Il est donc crucial que les estimateurs mathématiques utilisés soient de bonne qualité : robustes et non-baisés. En particulier, la présence d'un impact de rayon cosmique ne doit pas affecter le résultat. La moyenne arithmétique est le meilleur estimateur d'une population pure, et l'on s'efforce donc d'épurer nos échantillons avant de les moyenner.
Cela consiste d'une part à corriger des fluctuations systématiques que l'on puisse mesurer, et d'autre part à rejeter les événements trop déviants du groupe.
La correction des fluctuations permet d'obtenir un échantillon assez homogène
pour pouvoir lui appliquer l'algorithme de réjection.
Ensuite, pour connaître l'amplitude des écarts acceptables, il faut
disposer d'une bonne estimation du bruit statistique de l'échantillon,
qui se résume à son écart-type ![]() dans l'hypothèse d'une loi normale.
dans l'hypothèse d'une loi normale.
L'estimateur que j'ai implémenté procède à une réjection itérative
des événements déviants de plus de N![]() de la médiane des
événements non-rejetés (N étant un paramètre ajustable,
généralement choisi à 5, ce qui rejette 0.6ppm des événements d'une
population pure dont le
de la médiane des
événements non-rejetés (N étant un paramètre ajustable,
généralement choisi à 5, ce qui rejette 0.6ppm des événements d'une
population pure dont le ![]() est correctement estimé). La moyenne,
éventuellement pondérée, des événements valides donne l'estimation
voulue.
Je me réfèrerais par la suite à cet estimateur comme une moyenne robuste.
est correctement estimé). La moyenne,
éventuellement pondérée, des événements valides donne l'estimation
voulue.
Je me réfèrerais par la suite à cet estimateur comme une moyenne robuste.
Diverses variantes sont utilisées, pour ne rejeter que les événements trop
hauts, ou pour s'adapter aux propriétés statistiques de l'échantillon
(![]() identique ou propre à chaque événement, loi de Poisson avec ou
sans piédestal)
identique ou propre à chaque événement, loi de Poisson avec ou
sans piédestal)
L'estimateur a besoin d'information sur le bruit propre aux données d'entrée, et se doit d'en déduire la précision de son estimation. On propage ainsi les incertitudes de mesure à chaque étape de la calibration.
Les processus aléatoires physiques s'étendent généralement dans l'espace et durent dans le temps (c'est le cas des gouttes de pluie). On peut donc calculer leur écart-type spatial ou temporel : la dispersion en divers lieux dans un laps de temps donné, et la dispersion à diverses époques en un même endroit respectivement.
Une variable aléatoire est dite ergodique si ses propriétés statistiques spatiales et temporelles sont identiques. Il est alors équivalent d'estimer la moyenne et l'écart-type spatialement ou temporellement.
Une variable aléatoire est dite stationnaire si sa fonction de répartition est indépendante du temps. L'estimation peut alors se faire sur n'importe quel laps de temps, et les résultats seront compatibles entre eux.
Ces deux propriétés simplifient le travail d'estimation, et sont supposées lorsque la physique sous-jacente le justifie. Dans le cas contraire, on tentera de construire des variables normalisées ayant ces propriétés.
La vérification de l'ergodisme ou de la stationnarité est intrinsèquement limitée par le nombre d'événements accessibles : si l'on veut connaître précisément la moyenne temporelle, il faut recueillir un grand nombre d'événements, donc attendre suffisamment longtemps. La résolution temporelle des mesures sera alors mauvaise. Inversement, plus on voudra suivre le détail des fluctuations temporelles, plus le nombre d'événements disponibles par intervalle de mesure sera petit, affectant la précision de la mesure. C'est une dégénérescence classique entre précision et résolution.